Rodzaje przekładni w inżynierii mechanicznej
Koła zębate są wszechobecne w układach mechanicznych, nawet jeśli nie zawsze są widoczne. Od przekładni samochodowych, przez roboty przemysłowe, po precyzyjne instrumenty, cicho realizują jedno z najważniejszych zadań inżynieryjnych: przenoszenie ruchu i momentu obrotowego w kontrolowany sposób.
Mówiąc najprościej, koła zębate to zazębione elementy mechaniczne, które zazębiają się, przenosząc siłę obrotową między wałami. W zależności od konstrukcji, mogą zmieniać prędkość, moment obrotowy, a nawet kierunek ruchu. Większość publikacji technicznych opisuje koła zębate jako podstawę układów przeniesienia napędu w nowoczesnych maszynach, zwłaszcza tam, gdzie wymagana jest niezawodność i precyzja.
Na Szybki model, producent z Shenzhen specjalizujący się w obróbce CNC i szybkim prototypowaniu, komponenty przekładni stanowią część wielu niestandardowych projektów inżynieryjnych, które wspieramy. Różne branże często wymagają bardzo różnych konstrukcji przekładni, co sprawia, że zrozumienie głównych typów przekładni jest kluczowe zarówno przy podejmowaniu decyzji projektowych, jak i produkcyjnych.
Poniżej znajduje się praktyczny przegląd najczęściej stosowanych typów przekładni w inżynierii mechanicznej, przedstawiony w sposób bardziej zorientowany na zastosowanie niż czysto teoretyczne definicje.
1. Przekładnia zębata czołowa

Koła zębate walcowe to zazwyczaj pierwszy rodzaj przekładni, z jakim spotykają się inżynierowie. Mają prostą konstrukcję, z prostymi zębami ściętymi równolegle do osi obrotu. Dzięki takiej geometrii przenoszą moc między równoległymi wałami w bardzo bezpośredni i wydajny sposób.
Jednym z powodów, dla których koła zębate walcowe są tak powszechnie stosowane, jest ich prosty proces produkcji. Są stosunkowo łatwe w obróbce, kontroli i wymianie, co pozwala na utrzymanie niskich kosztów zarówno w prototypowaniu, jak i produkcji masowej.
W rzeczywistych zastosowaniach koła zębate walcowe są powszechnie spotykane w skrzynie biegów, systemy przenośnikowe, zegary mechanicznei podstawowego sprzętu przemysłowego. Wadą jest to, że generują one więcej hałasu przy wyższych prędkościach, ponieważ zęby zazębiają się nagle, a nie stopniowo.
Z punktu widzenia konstrukcji przekładnie zębate walcowe są często wybierane w sytuacjach, gdy wydajność i prostota mają większe znaczenie niż redukcja hałasu.
2. Koło zębate śrubowe

Na pierwszy rzut oka koła zębate śrubowe wyglądają podobnie do kół zębatych czołowych, ale kluczowa różnica tkwi w geometrii zębów. Zamiast zębów prostych, koła zębate śrubowe mają zęby kątowe, które oplatają korpus koła spiralnie.
Taka kątowa konstrukcja pozwala na stopniowe zazębianie się zębów, co sprawia, że praca jest zauważalnie płynniejsza i cichsza. Poprawia to również rozkład obciążeń, co oznacza, że koła zębate śrubowe mogą przenosić większe obciążenia w porównaniu z kołami zębatymi walcowymi o podobnej wielkości.
Zaleta ta wiąże się jednak z pewnymi wymogami konstrukcyjnymi: podczas pracy powstaje nacisk osiowy, więc wymagane jest odpowiednie podparcie łożyska.
Ze względu na płynną pracę, przekładnie śrubowe są szeroko stosowane w przekładniach samochodowych, maszynach szybkobieżnych, windach i sprężarkach. W większości nowoczesnych przekładni przemysłowych przekładnie śrubowe są często domyślnym wyborem, gdy liczy się niski poziom hałasu i trwałość.
3. Przekładnia stożkowa

Przekładnie stożkowe są stosowane, gdy konieczne jest przeniesienie mocy między wałami, które się przecinają, zazwyczaj pod kątem 90 stopni. Ich zęby są nacięte na powierzchni stożkowej, co pozwala na zmianę kierunku obrotu w kompaktowej przestrzeni.
Istnieją różne warianty, takie jak koła zębate stożkowe proste i stożkowe spiralne. W praktyce koła zębate stożkowe spiralne są częściej spotykane w zastosowaniach o wysokiej wydajności, ponieważ zapewniają płynniejsze zazębianie i lepszą nośność.
Przekładnie stożkowe są powszechnie stosowane w mechanizmy różnicowe samochodowe, narzędzia ręczne, morskie systemy napędowe i przekładnie przemysłowe, w których wymagana jest zmiana kierunku.
W porównaniu z kołami zębatymi prostymi lub śrubowymi, koła zębate stożkowe wymagają bardziej złożonej konstrukcji, ale rozwiązują ważny problem: wydajne przenoszenie ruchu między wałami nierównoległymi.
4. Przekładnia ślimakowa

Przekładnia ślimakowa składa się ze ślimaka o kształcie śruby i współpracującego z nim koła zębatego. Ruch jest przenoszony między wałami, które się nie przecinają, zazwyczaj ustawionymi pod kątem prostym.
Jedną z najważniejszych cech przekładni ślimakowych jest ich zdolność do osiągania bardzo wysokich przełożeń w jednym etapie. To sprawia, że są one niezwykle przydatne w kompaktowych systemach, gdzie przestrzeń jest ograniczona, a redukcja momentu obrotowego jest znacząca.
W wielu konstrukcjach przekładnie ślimakowe są również samoblokujące, co oznacza, że wyjście nie może łatwo napędzać wejścia. Funkcja ta jest często wykorzystywana w celu zapewnienia bezpieczeństwa lub utrzymania pozycji bez dodatkowych układów hamulcowych.
Typowe zastosowania obejmują systemy podnoszenia, napędy przenośników, mechanizmy dostrajające i wytrzymałe systemy pozycjonujące.
5. Przekładnia zębata

Układy zębatkowe przekształcają ruch obrotowy w ruch liniowy. Zębatka to standardowa przekładnia zębata o przekroju kołowym, a listwa zębata to prosty listew zębaty.
Gdy koło zębate obraca się, zębatka porusza się po linii prostej. Ten prosty mechanizm jest szeroko stosowany, ponieważ zapewnia precyzyjny i przewidywalny ruch liniowy.
Układy zębatkowe można najczęściej spotkać w układach kierowniczych w pojazdach samochodowych, maszynach CNC, siłownikach liniowych i mechanizmach kolejowych.
W automatyce i robotyce ten typ układu przekładni jest często wybierany, gdy wymagane jest dokładne pozycjonowanie liniowe.
6. Układ przekładni planetarnej

Układy przekładni planetarnych są bardziej złożone w porównaniu z podstawowymi parami kół zębatych, ale charakteryzują się niezwykle wysoką wydajnością w kompaktowej konstrukcji mechanicznej. Układ zawiera koło słoneczne w środku, kilka kół planetarnych oraz zewnętrzne koło pierścieniowe.
Cechą charakterystyczną przekładni planetarnych jest sposób, w jaki obciążenie rozkłada się na wiele punktów styku. Pozwala to na przenoszenie wysokiego momentu obrotowego w stosunkowo małej objętości.
Są powszechnie stosowane w automatycznych skrzyniach biegów, przegubach robotów, mechanizmach lotniczych i układach napędowych pojazdów elektrycznych.
Ze względu na swoją wydajność i zwartą budowę, układy przekładni planetarnych są często wybierane w sytuacjach, gdy liczą się zarówno ograniczenia przestrzenne, jak i wydajność.
7. Przekładnia w jodełkę

Przekładnie zębate o przekroju jodełkowym można uznać za zaawansowaną formę przekładni śrubowych. Zamiast jednego kierunku linii śrubowej, łączą one dwie przeciwległe spirale w układzie V.
Taka konstrukcja eliminuje nacisk osiowy, który stanowi poważne ograniczenie w standardowych przekładniach śrubowych. Dzięki temu przekładnie o zębach skośnych mogą płynnie pracować pod dużym obciążeniem bez konieczności stosowania dodatkowych łożysk oporowych.
Są one zazwyczaj stosowane w morskich systemach napędowych, elektrowniach i przekładniach przemysłowych.
Główną wadą jest złożoność produkcji, przez co są one droższe w porównaniu ze standardowymi typami przekładni.
8. Przekładnia wewnętrzna
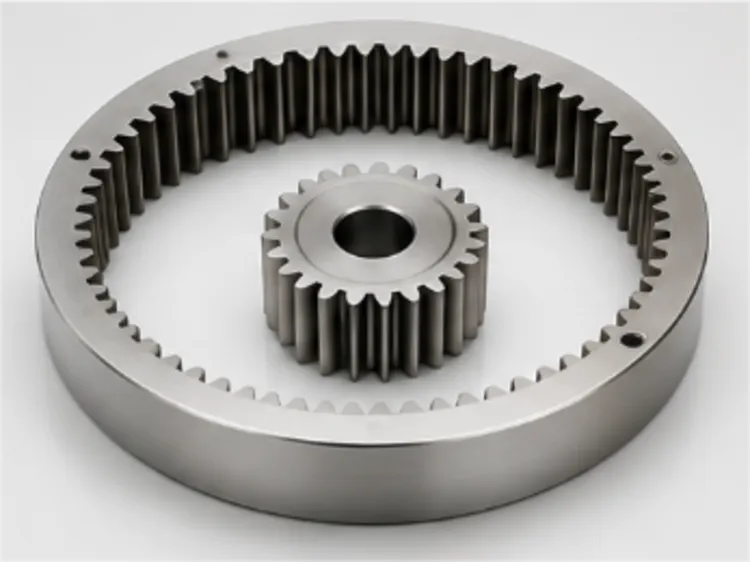
Koła zębate wewnętrzne mają zęby nacięte na wewnętrznej powierzchni pierścienia, a nie na zewnętrznej. Są one często stosowane w połączeniu z przekładniami planetarnymi lub kompaktowymi mechanizmami napędowymi.
Jedną z ich głównych zalet jest oszczędność miejsca. Ponieważ koła zębate zazębiają się wewnętrznie, cały system może być bardziej kompaktowy w porównaniu z zewnętrznymi układami przekładni.
Przekładnie wewnętrzne są powszechnie stosowane w robotyce, precyzyjnych skrzyniach biegów i zautomatyzowanych systemach mechanicznych, w których przestrzeń montażowa jest ograniczona.
Wgląd w inżynierię dzięki Rapid-Model
Na Szybki modelwspieramy globalnych klientów w Obróbka CNC, szybkie prototypowanie i produkcja precyzyjnych części mechanicznych w małych seriach, w tym niestandardowych układów przekładni. Niezależnie od tego, czy chodzi o prostą przekładnię zębatą czołową do prototypu, czy o złożony element przekładni planetarnej, nasz zespół inżynierów ściśle współpracuje z klientami, aby zapewnić wykonalność i wydajność.
Nasze możliwości produkcyjne obejmują szeroką gamę materiałów, takich jak stopy aluminium, stal nierdzewna, mosiądz i tworzywa konstrukcyjne. W połączeniu z precyzyjnymi procesami CNC, pozwala nam to sprostać wymaganiom funkcjonalnym i prototypowym w branżach takich jak robotyka, automatyka, motoryzacja i urządzenia przemysłowe.
Wniosek
Istnieją różne typy przekładni, ponieważ różne wyzwania mechaniczne wymagają odmiennych rozwiązań. Przekładnie walcowe oferują prostotę, przekładnie śrubowe poprawiają płynność, przekładnie stożkowe zmieniają kierunek, przekładnie ślimakowe zapewniają wysoką redukcję, układy zębate przekształcają ruch, przekładnie planetarne zapewniają kompaktową wydajność, a przekładnie daszkowe i wewnętrzne rozwiązują bardziej specjalistyczne problemy inżynieryjne.
Wybór właściwego sprzętu nigdy nie jest wyłącznie decyzją teoretyczną — ma on bezpośredni wpływ na wydajność, koszty i niezawodność systemu.
Dla zespołów inżynieryjnych poszukujących niezawodnego wsparcia produkcyjnego, Szybki model zapewnia praktyczne rozwiązania w zakresie obróbki CNC i prototypowania dostosowane do rzeczywistych potrzeb projektowania mechanicznego.